近日��,我院王汝貴教授團隊基于厚板折紙原理�����,提出了一種對復雜交互環(huán)境具有強適應性能的柔性機械手�,成果以“Design of thick panels origami-inspired flexible grasper with anti-interference ability”為題,發(fā)表在機器人機構(gòu)學領域著名期刊�、國際機構(gòu)學與機器科學聯(lián)合會(IFToMM)會刊《Mechanism and Machine Theory》(雙一區(qū),TOP期刊)上��,廣西大學為唯一完成單位��,王汝貴教授為第一作者兼通訊作者�。
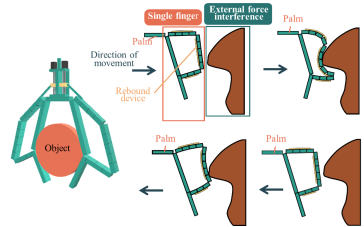
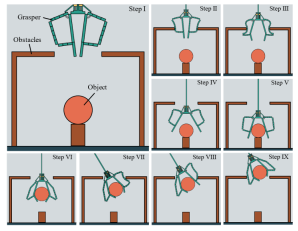
圖1廣西大學柔性抓手(GXU-F-Grasper)
本研究成果兼具了剛性構(gòu)件抓手的抓取穩(wěn)定性和柔性構(gòu)件抓手的抗干擾能力兩種優(yōu)勢,為抓手在復雜交互環(huán)境下穩(wěn)定抓取物體提供了新的策略�。該抓手構(gòu)型經(jīng)《Mechanism and Machine Theory》期刊評審專家和主編審議, 成功將其命名為“廣西大學柔性抓手”(GXU-F-Grasper)。
圖2廣西大學抓手(GXU- Grasper)
抓手作為機器人的末端執(zhí)行器�,是我國《“十四五”“機器人產(chǎn)業(yè)發(fā)展規(guī)劃》(工信部聯(lián)規(guī)〔2021〕206號,工業(yè)和信息化部、國家發(fā)展和改革委員會����、科學技術部等15部門聯(lián)合發(fā)文)重要研究計劃內(nèi)容之一。近年來��,王汝貴教授帶領的現(xiàn)代機構(gòu)學與機器人化裝備研究團隊致力于機器人末端執(zhí)行器設計與性能分析的研究�����,成果發(fā)表在《機械工程學報》���、《Mechanism and Machine Theory》�����、《Journal of Mechanisms and Robotics-Transactions of the ASME》�、《Journal of Mechanical Design-Transactions of the ASME》等國內(nèi)外著名期刊上��,創(chuàng)新創(chuàng)造出了系列抓手設計方案�,并在機械工程領域以我校校名對研究成果進行命名,比如2023年1月在美國機械工程師學會(ASME)期刊以“Self-Adaptive Grasping Analysis of a Simulated‘Soft’Mechanical Grasper Capable of Self-Locking”為題在線發(fā)表的一種仿“軟體”剛性自適應抓手����,在論文中將該抓手成功命名為“廣西大學抓手”(GXU-Grasper)。據(jù)悉���,在機器人抓手設計史上���,相關代表性抓手設計方案均以人名或單位對抓手進行命名,比如Stanford手�、Utah/MIT手、DLR/HIT手�,等等。
(原文鏈接:https://doi-org-s.vpn.gxu.edu.cn:8118/10.1016/j.mechmachtheory.2023.105431)


